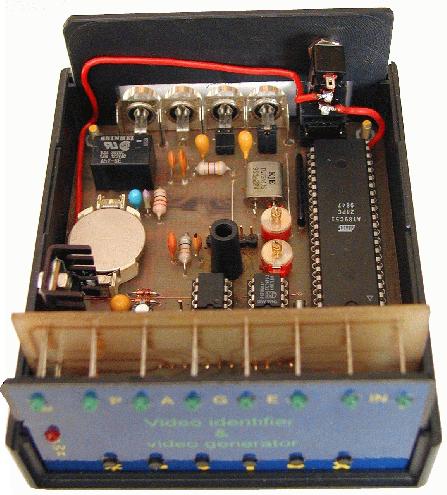
Když jsem chodil do RK OK1OHK, tak tam Petr OK1IPV s Pavlem OK1JOS experimentovali s ATV. Chytlo mě to taky, postavil jsem TX dle S51KQ. Řízení PLL jsem si navrhl sám s mcu AT2051. TX jsem doplnil videoidentifikátorem vlastní konstrukce, který je založen na obvodu STV5730A. Chtěl jsem kompaktní řešení, aby se to bez problémů dalo používat na kopcích, tak jsem to vše umístil do batohu.
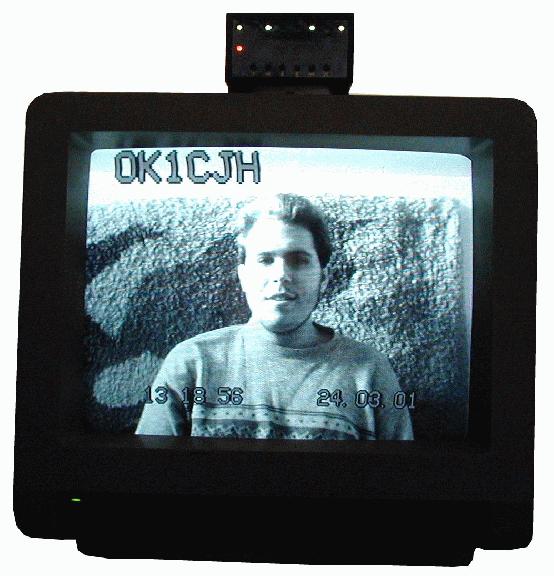
První delší QSO jsem měl s Petrem OK1IPV na cca 10 Km. Nejvíc jsem si ATV užil s Jirkou OK1FCB, půjčil jsem mu RX a já jsem se s TX vypravil do hor. Nejúspěšnější bylo asi QSO na 42 km Velká Deštná - Hradec Králové.




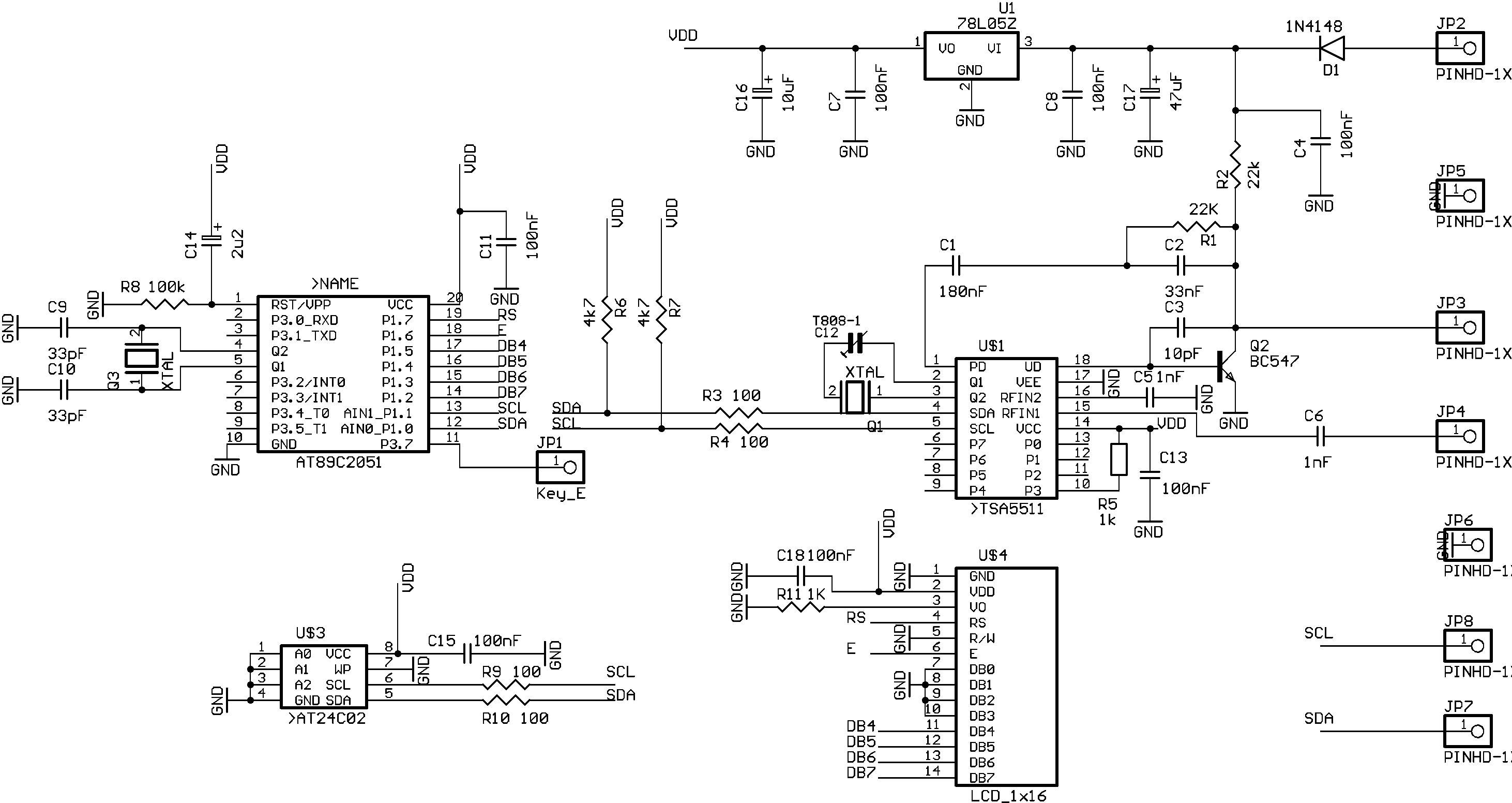
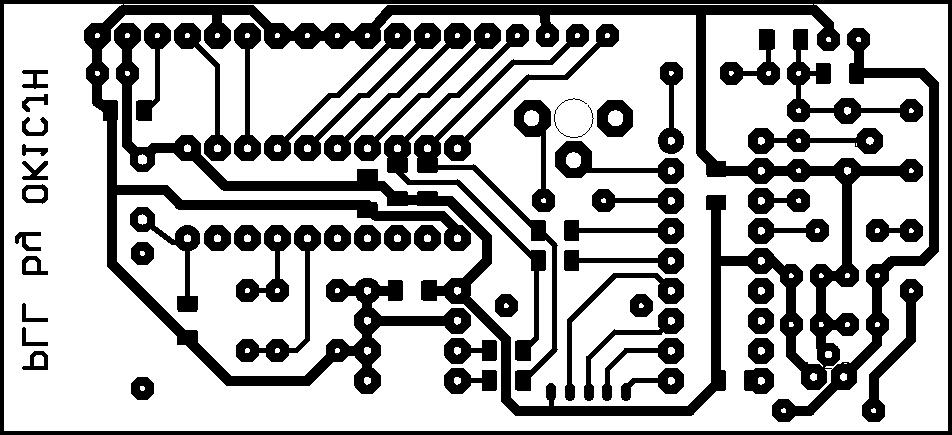
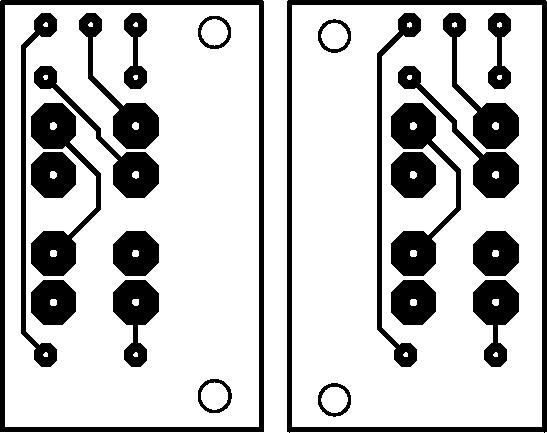
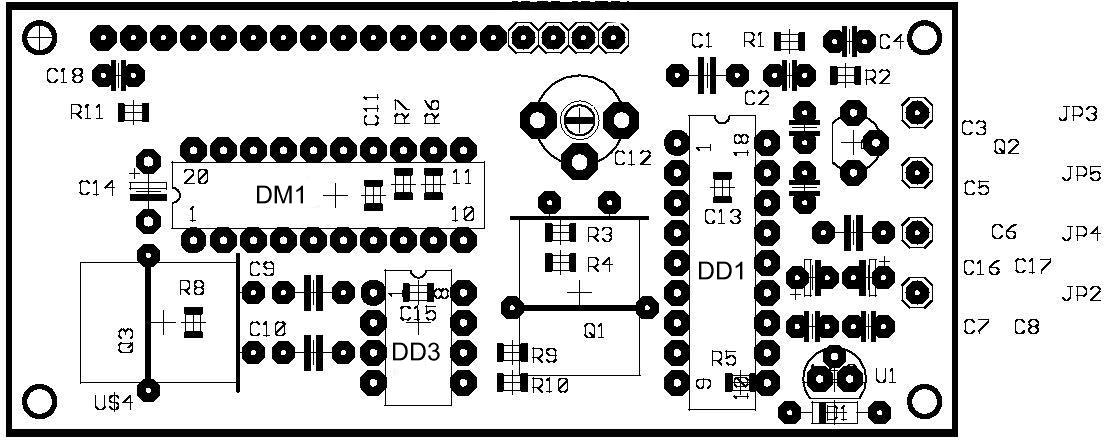
Modul PLL jsem se rozhodl navrhnout vlastní. Je to konstrukce poměrně stará z doby, kdy jsem byl na střední škole, tak i kvalita dokumentace tomu odpovídá.
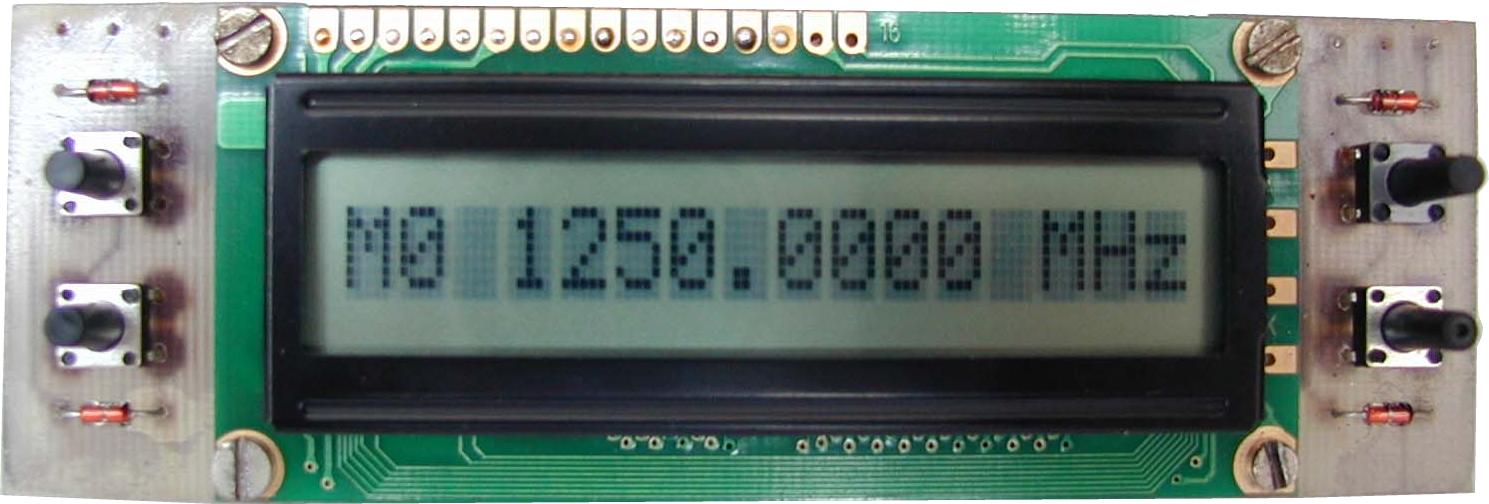
Tlačítko "*" je vlevo nahoře. Tlačítko "X" je vlevo dole. Vpravo jsou tlačítka "up" a "down". Po zapnutí je modul v režimu VFO. Tlačítko "*" k nastavení kroku ladění. Tlačítko je potřeba držet a současně stiskávat "up" a "down". Tlačítko "X" slouží k přechodu z režimu VFO do režimu pamětí (0 až 9) a zpět. Pro uložení Paměti je potřeba nastavit požadovanou frekvenci v režimu VFO, dlouze držet tl. "X" a tlačítky "up" a "down" nastavit číslo paměti, nakonec uvolnit tl. "X".

Modul je založen na obvodu STV5730A, který se již nevyrábí, tak jen pár fotek. VID se ovládá pomocí On screen menu.